
Build a Robot
EMBiR Lab is on a mission to democratize the field of robotics and help make robots affordable and available to everyone. Here is a list of our open-source robots, complete with build instructions and associated research publications. Some are accompanied with teaching modules to demonstrate how the robots can help students gain hands-on experience with robotics. If you build one and post it to social media, please tag us with #EmbirBuilds!
SnakeFree

Fiber-Reinforced Elastomeric Enclosures Mimic Snake Behaviors
These easy to build robots make great outreach activities and are cheap and fun to play with. They can also be built to mimic the behaviors of different snake species.

The Robot of Theseus
This robot is designed to be cheap, easy to assemble and repair, and totally modular. The legs can be modified to match any mammal and even test theoretical morphologies. Build it yourself for less than $4000!

SKating, Omni-Oriented, Tripedal Robot
This chimeric robot combines a ball-bot, a tripod, and hybrid contacts to traverse a variety of environments. Its unique shape led to the discovery of three novel gaits. It makes a great teaching or hobby robot at less than $400!

3D Printed Actuator
This Quasi-Direct Drive actuator costs ~$350 to make and requires no specialized tooling or machining. It uses a cheap PMSM motor and either a 7.5:1 Planetary or 15:1 Bilateral drive gearbox. Great for high torque, low OMI, and lightweight robotic applications!
Klaan Quadruped

Dynamic, Open-Source Klaan Robot
This was designed as an educational platform that can be used to teach full-stack robotics skills. The parts are laser cut, 3D printed, or off-the-shelf. Students can easily modify the robot to test predictions and explore new designs!
COMING SOON!
ArborSim
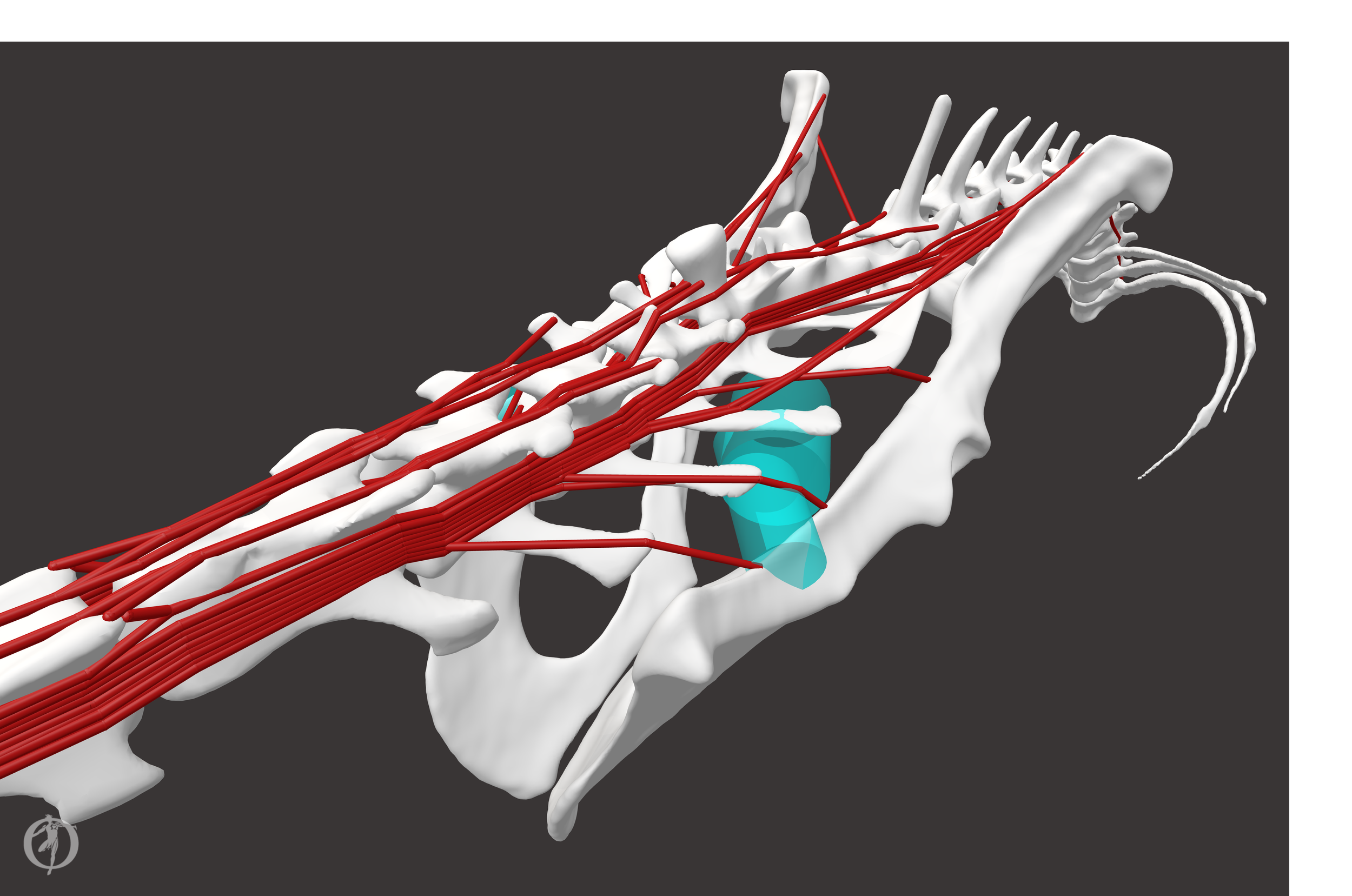
Articulated, Branching OpenSim Routing
This software assists in constructing OpenSim models for highly jointed structures with muscle-tendon units spanning more than three joints. ArborSim also facilitates the explicit modeling of the branching structure found in in the tendons associated with the axial skeleton and phalanges.
TALE-Teller

TALE-teller: Tendon-Actuated Linked Element Robotic Testbed for Investigating Tail Functions
Vertebrate tails are complex musculoskeletal structures, making both direct experimentation and computational modeling challenging. This paper presents Tendon-Actuated Linked-Element (TALE), a modular robotic test bed for exploring how tail morphology influences function. By varying 3D printed bones, silicone joints, and tendon configurations, TALE can match the morphology of extant, extinct, and even theoretical tails.
COMING SOON!

HASEL Actuator design for Out-of-Plane Bending
This paper addresses this gap through the characterization of two important design parameters that affect out-of-plane bending of planar HASEL actuator designs. In particular, a sinusoidal wave pattern is parameterized by the period length and the minimum channel width. The ratio of the period length to channel width is shown to be a good predictor for the curvature of the HASEL actuators when bending out-of-plane.

Release Chamber Enables Suction Cup to Delaminate and Harvest Fluid
We designed a suction cup with a secondary release chamber embedded in the contact ring. The release chamber triggers delamination by deforming the shape of the contact ring. Our design allows for reliable detachment regardless of the adhesive suction force. Because the release chamber is a closed system, attachment and detachment results in harvesting fluid to power other pressure-driven soft robotic systems.
Bite-Bot

Bite-Bot: A robotic platform for studying envenomation
Envenomation is a complex, multi-physics phenomenon, but most analyses consider only a subset of the biomechanical interactions involved. Bite-Bot allows users to independently vary key parameters affecting venom delivery, including fang shape, fang size, venom pressure, duration of pressurization, force, and speed of the bite.
COMING SOON!