
RoboSoft 2025 Best Student Paper Finalist
Robosoft 2025 Best Paper Winner for Benchmarking and Reproducibility
Release Chamber Enables Suction Cup to Delaminate and Harvest Fluid
Xiangyun Bu, Yihao Geng, Siyuan Yin, Liyan Luo,
Cameron A. Aubin, Talia Y. Moore

Suction is a useful strategy to grasp objects or anchor a body, especially when prolonged contact is desired. For passive suction cups, detachment requires manual delamination, which cannot occur autonomously. Active suction cups detach via equalizing pressure in the suction cavity with the surrounding environment, either by adding fluid (e.g., from a compressed air source) or reducing the cavity volume. While this detachment mechanism can be autonomous, it is inefficient, resulting in a net zero or loss of fluid. A more efficient detachment mechanism would enable multiple iterations of attachment and detachment without requiring additional fluid.
To address this need, we designed a suction cup with a secondary release chamber embedded in the contact ring. The release chamber triggers delamination by deforming the shape of the contact ring. Through empirical testing, we found the optimal location and geometry of the release chamber. Our design allows for reliable detachment with a 5~mL decrease in release chamber volume, regardless of the adhesive suction force. Because the release chamber is a closed system, attachment and detachment results in net gain of fluid. Therefore, we propose a novel secondary benefit of adhesion via suction: harvesting fluid to power other pressure-driven soft robotic systems.
Bibtex:
@inproceedings{Bu2024,author = {Xiangyun Bu and Yihao Geng and Siyuan Yin and Liyan Luo and Cameron A. Aubin and Talia Y. Moore},title = {Release Chamber Enables Suction Cup to Delaminate and Harvest Fluid},year = {2025},booktitle = {IEEE International Conference on Soft Robotics (RoboSoft)},}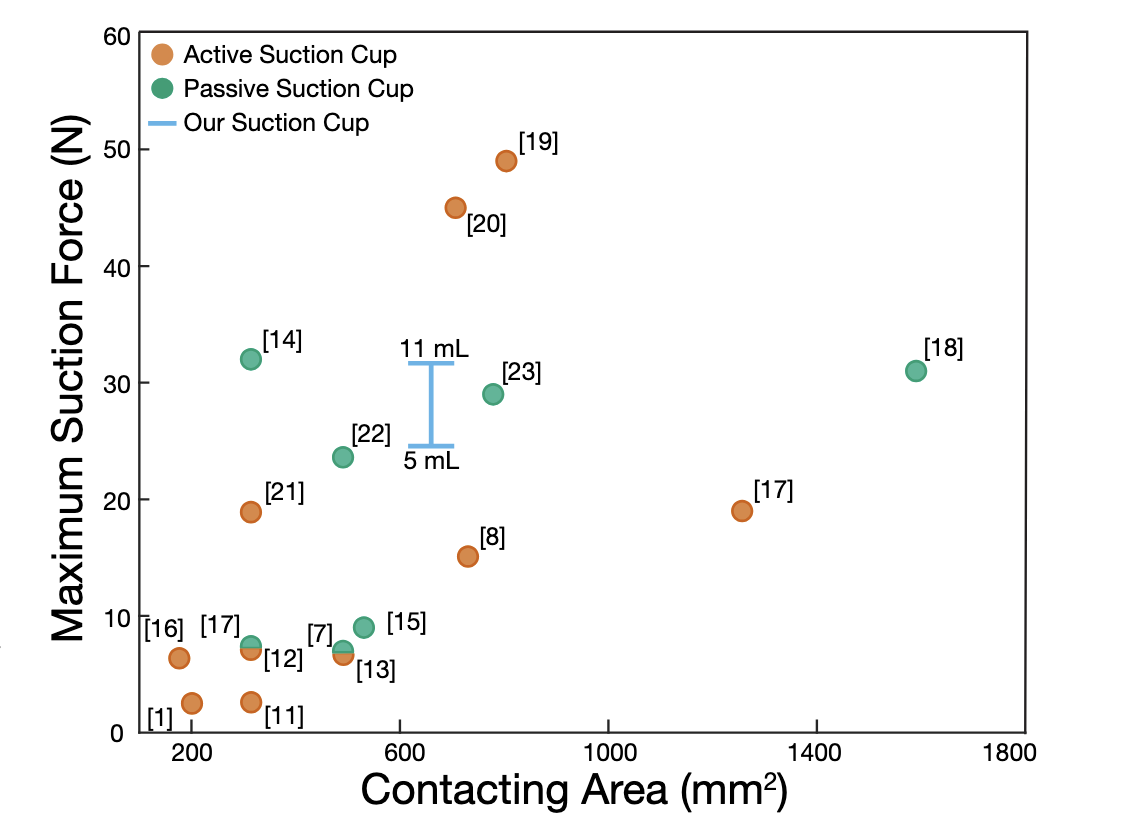
The range of suction forces we achieved are on par with other recently developed suction cups.

Suction cups delaminated using the release chamber harvested fluid volume each time they attached and detached, whereas suction cups detached using the suction chamber lost the potential for volume harvesting. On the x-axis, “s” stands for suction, and “r” stands for release. “Volume” on the y-axis corresponds to the measure of volume on the syringe.

The release chamber volume reduction required to detach was independent of suction force.