
SKOOTR: A SKating, Omni-Oriented, Tripedal Robot

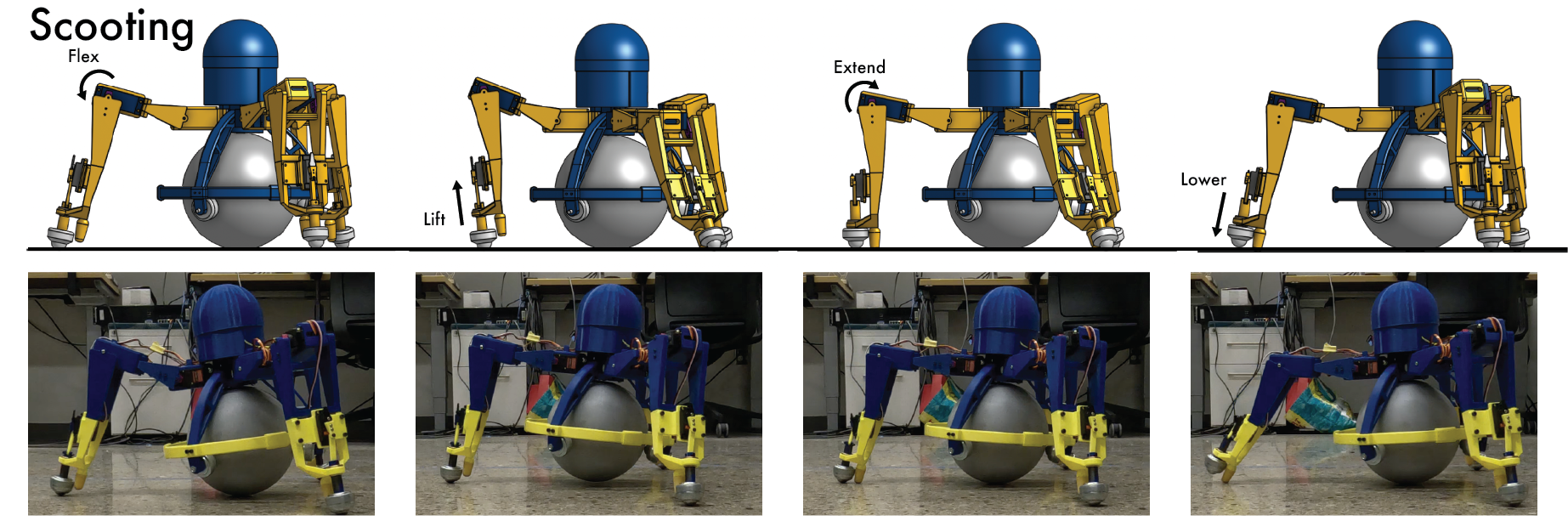
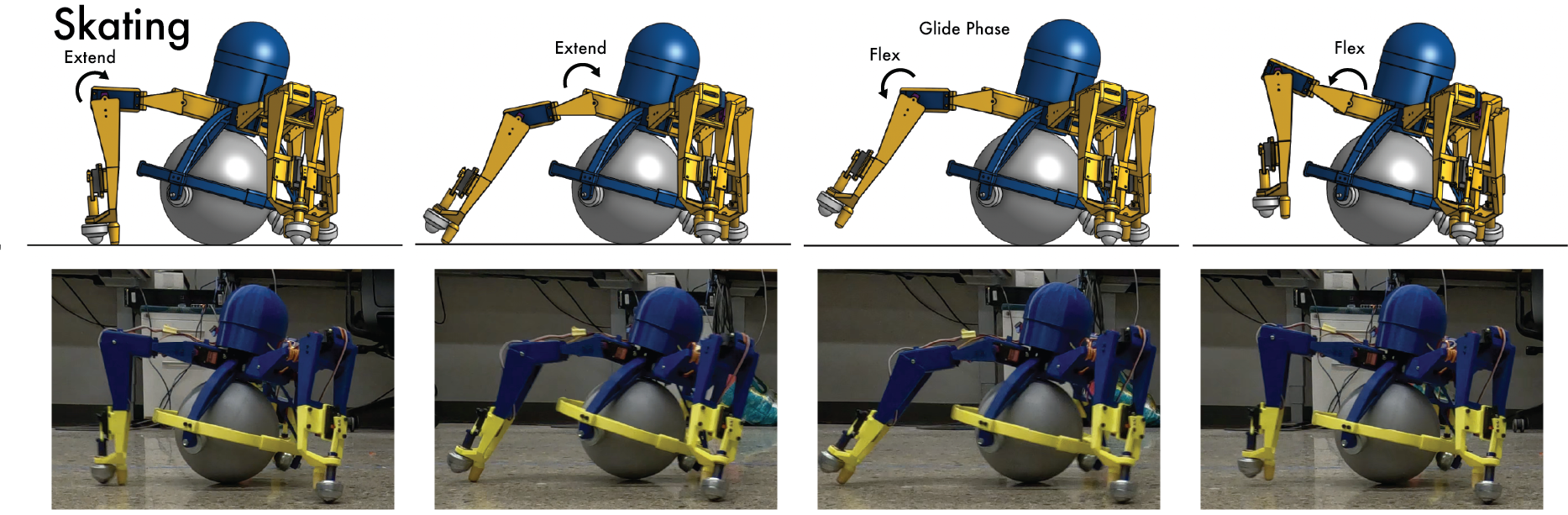
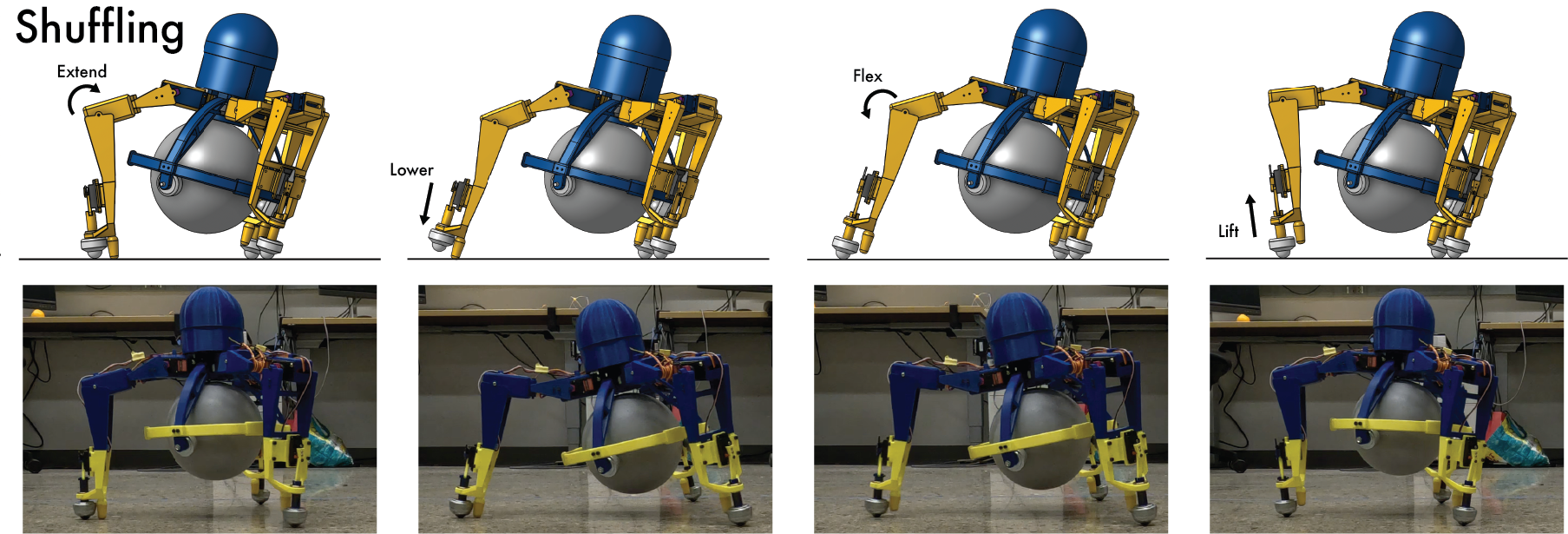
In both animals and robots, locomotion capabilities are determined by the physical structure of the system. The majority of legged animals and robots are bilaterally symmetric, which facilitates locomotion with consistent headings and obstacle traversal, but are often constrained in their turning ability. On the other hand, radially symmetric animals have demonstrated rapid turning due to their omnidirectional body plans. However, radially symmetric tripedal robots have instantaneous turning with every step, but the angular constraint associated with stepping with one of the three legs results in inefficient and dynamically unstable locomotion. We address these challenges by combining a tripedal robot with a freely rotating central rotating sphere. This robot is capable of multiple forward gaits, multiple turning maneuvers, and obstacle traversal. Because the ball provides a third contact point, the robot can retain a stable tripod base of support while lifting and pushing with any one of its legs. The SKating, Omni-Oriented, Tripedal Robot has been designed to facilitate customization for diverse applications: it is fully open-source, is constructed with 3D printed or off-the-shelf parts, and costs approximately $500 USD to build.

BibTex:
@article{skootr2025,author = {Hung, Adam and {Enninful Adu}, Challen and Moore, {Talia Yuki}},title = {SKOOTR: A SKating, Omni-Oriented Tripedal Robot},year = {\emph{in review}},journal = {IEEE ICRA},}